Paper
"DeepGame-TP: Integrating Dynamic Game Theory and Deep Learning for Trajectory Planning"
Authors: Giovanni Lucente, Mikkel Skov Maarssoe, Sanath Himasekhar Konthala, Anas Abulehia, Reza Dariani, Julian Schindler
Journal: IEEE Open Journal of Intelligent Transportation Systems (Volume: 5), 2024
DOI: 10.1109/OJITS.2024.3515270
Abstract
Trajectory planning for automated vehicles in traffic has been a challenging task and a hot topic in recent research. The need for flexibility, transparency, interpretability and predictability poses challenges in deploying data-driven approaches in this safety-critical application. This paper proposes DeepGame-TP, a game-theoretical trajectory planner that uses deep learning to model each agent’s cost function and adjust it based on observed behavior. In particular, a LSTM network predicts each agent’s desired speed, forming a penalizing term that reflects aggressiveness in the cost function. Experiments demonstrated significant advantages of this innovative framework, highlighting the adaptability of DeepGame-TP in intersection, overtaking, car following and merging scenarios. It effectively avoids dangerous situations that could arise from incorrect cost function estimates. The approach is suitable for real-time applications, solving the Generalized Nash Equilibrium Problem (GNEP) in scenarios with up to four vehicles in under 100 milliseconds on average.
Links
Full Paper: Read Here
GitHub Repository: View on GitHub
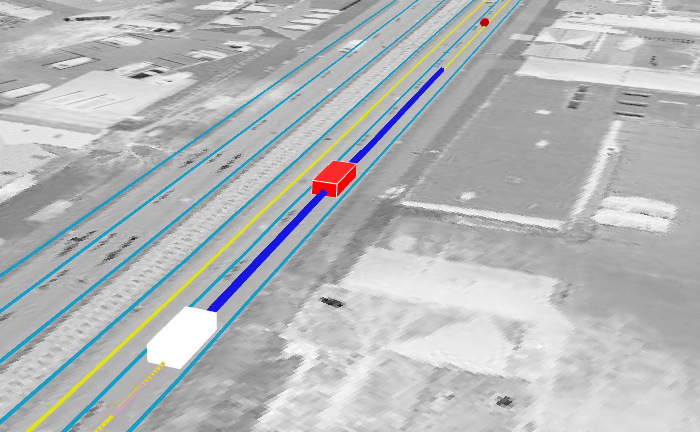
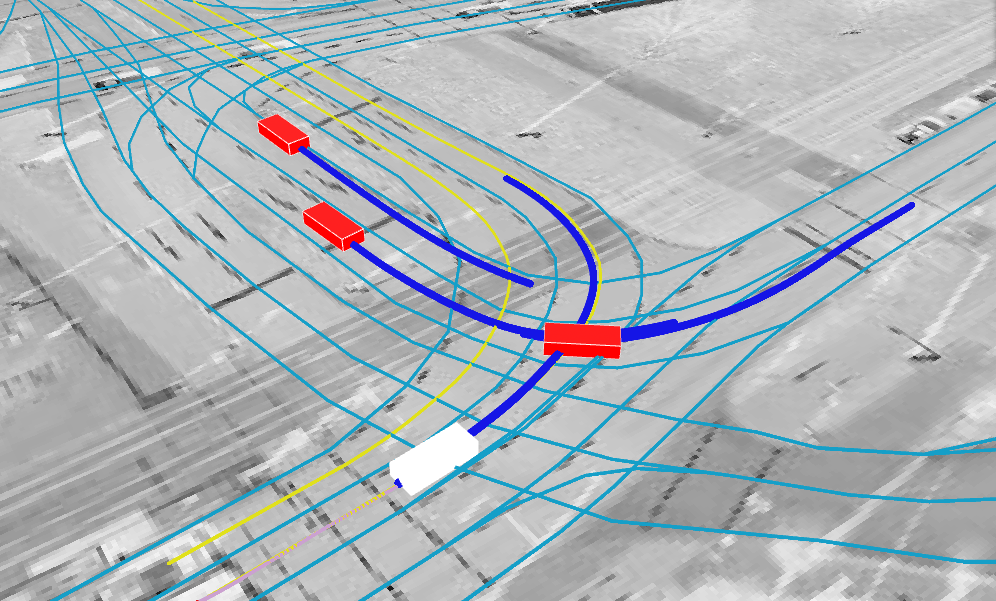
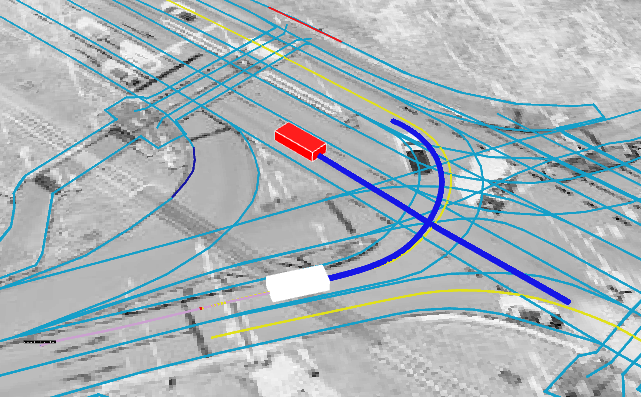
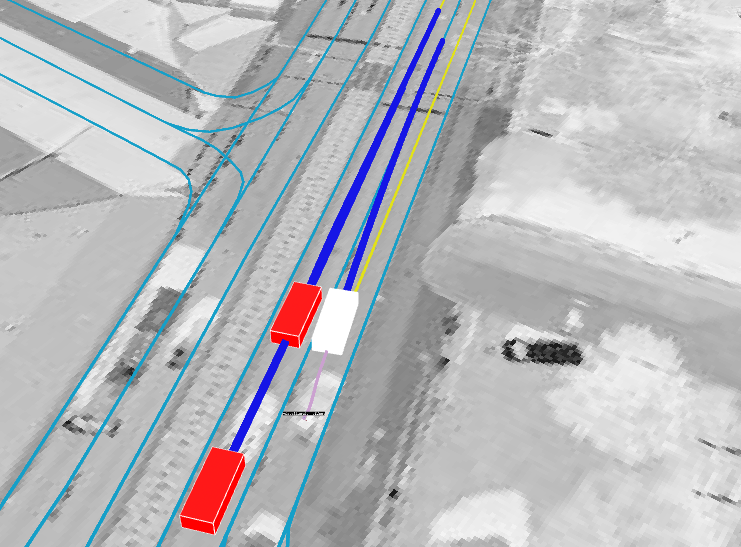
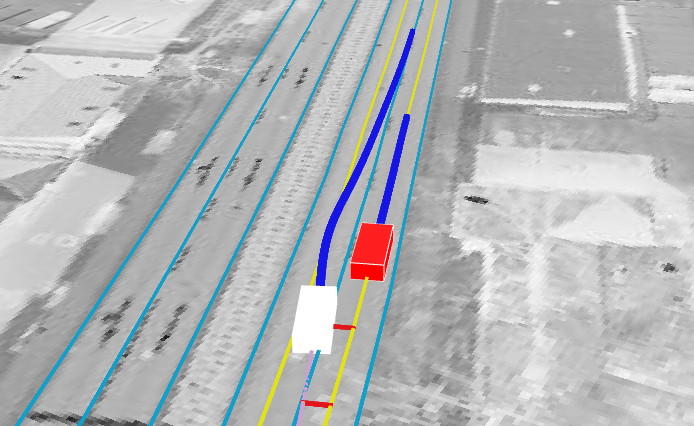
Scenarios